Mit dem Rover nach Sizilien – Projekt im Beruflichen Gymnasium

Text von Oskar Keul, Schüler der Klasse GI23 am CRBK Hennef
Hightech, Teamwork und Vulkankrater – unser Weg zum Erfolg bei der DLR_Summer_School Vulcano 2025
Wie bringt man einen Rover dazu, sich im sandigen, staubigen und steinigen Terrain eines Vulkangeländes zu bewegen – und dabei Gesteinsproben aufzunehmen, Messdaten zu sammeln und seine eigene Technik zuverlässig zu schützen? Genau diese Herausforderung hat sich unser Team „Vulcanauts“ gestellt – und erfolgreich gemeistert.
Im Rahmen der DLR_Summer_School Vulcano 2025, einem deutschlandweiten Wettbewerb des Deutschen Zentrums für Luft- und Raumfahrt (DLR), waren wir als Schüler der Klasse 12 des beruflichen Gymnasiums für Technik am Carl-Reuther-Berufskolleg aufgefordert, einen Rover zu entwerfen, zu bauen und zu testen, der mit möglichst viel Eigenentwicklung den extremen Anforderungen eines Vulkaneinsatzes standhält. Dafür hatten wir zwei Monate Zeit und die Arbeit erfolgte hauptsächlich außerhalb des regulären Unterrichts sowie in den Ferien mit Unterstützung von den Fachlehrern Dr. Stefan Frank-Richter und Stefan Zündorf.
Von der Idee zum echten Prototypen
Nach einer erfolgreichen Bewerbung in der ersten Phase, bei der wir unsere technische Konzeptidee einreichen mussten, ging es für uns in die zweite Phase – den Bau und die Umsetzung. Was anfangs noch als theoretisches Konzept auf Papier existierte, wurde Stück für Stück in reale, greifbare Technik verwandelt.
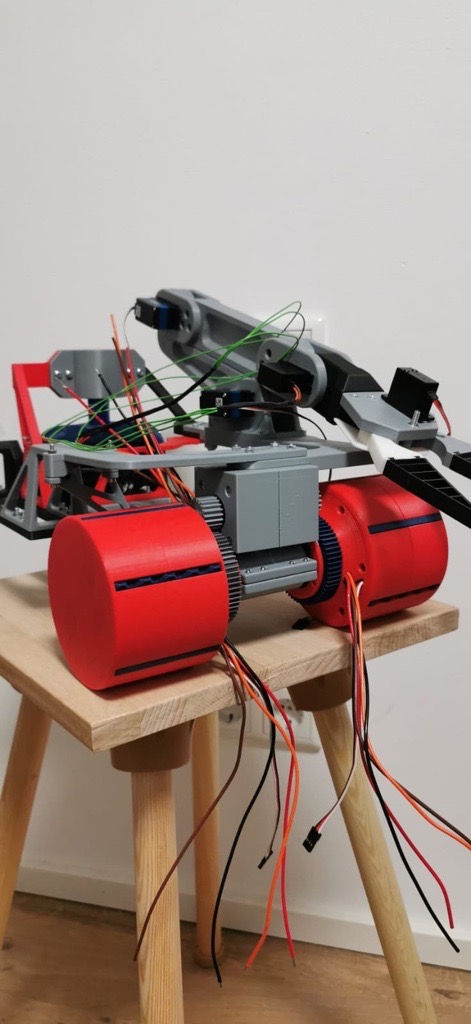
Dabei setzten wir von Anfang an auf einen hohen Grad an Eigenkonstruktion: Das gesamte Chassis (Rahmen des Rovers) und viele Bauteile des Rovers wurden im 3D-Druck gefertigt – leicht, stabil und individuell anpassbar. Unser Antriebssystem basiert auf einem dreirädrigen Fahrkonzept mit flexibler Lenkung, das permanenten Bodenkontakt garantiert und Wendigkeit auf engem Raum ermöglicht.
Technik, die sich anpasst: Spezialreifen & Ray-Fin-Greifer
Besonders stolz sind wir auf zwei zentrale Innovationen: die ausfahrbaren Reifenprofile und unseren Ray-Fin-Greifer.
Die beiden vorderen Räder unseres Rovers verfügen über integrierte Schaufeln und Spikes, die per Iris-Mechanismus aus dem Profil ausgefahren werden können. Je nach Untergrund – ob Sand, Gestein oder loser Staub – kann das Profil angepasst werden, um optimale Traktion zu gewährleisten. Entwickelt haben wir dieses System über mehrere Iterationen hinweg selbst und vollständig im 3D-Druck umgesetzt.
Unser Greifarm, der mithilfe eines flexiblen Ray-Fin-Mechanismus arbeitet, ist inspiriert von der natürlichen Struktur von Fischflossen. Durch diese Struktur passt sich der Greifer automatisch an die Form der Gesteinsproben an – ganz ohne komplexe Sensorik. Gedruckt aus TPU (einem elastischen Kunststoff), ist der Greifer nicht nur flexibel, sondern auch robust genug für echten Einsatz.
Elektronik, Steuerung und Tests
Auch die Steuerung des Rovers wurde von uns selbst programmiert: Ein ESP32-Mikrocontroller bildet das Herz der Steuerung, über eine eigens entwickelte Weboberfläche kann der Rover gesteuert und überwacht werden. Die Sensorik für Luftdruck, Temperatur und Luftfeuchtigkeit erfasst Umweltdaten, die gespeichert und ausgewertet werden können. Eine eigens entwickelte Leiterplatte (PCB) wurde entworfen, jedoch konnte sie aufgrund von Lieferverzögerungen noch nicht bestückt werden – eine provisorische Breadboard-Lösung hielt den Betrieb trotzdem aufrecht.
In intensiven Tests, sowohl Indoor als auch im Freigelände, wurde der Rover auf Herz und Nieren geprüft – bis hin zur erfolgreichen Aufnahme eines Testobjekts mit dem Greifarm während der Fahrt.
Teamgeist und Ausdauer führen zum Ziel
Was uns als Team am meisten stolz macht, ist nicht nur das technische Ergebnis, sondern vor allem der Weg dorthin: Wir haben als Team durchgehend zusammengearbeitet, viele Herausforderungen kreativ und engagiert gelöst – von unerwarteten Druckfehlern über Lieferengpässe bis hin zur Feinjustierung unserer Mechanik. Auch wenn nicht alles auf Anhieb funktionierte, haben wir nie aufgegeben und unser Ziel nie aus den Augen verloren.
Am Ende hat sich unser Einsatz gelohnt: Wir zählen zu den Gewinnerteams der zweiten Phase der DLR_Summer_School und dürfen unseren Rover offiziell präsentieren bei einer Forschungsreise nach Vulcano Anfang Juni.
Vulcano ist eine Insel im Norden Siziliens und ist ideal geeignet um den selbst entwickelten Rover zu testen. Zudem ist für die Schüler auch Programm vorgesehen, das aus Workshops, Arbeit im Feld und Seminaren besteht, geleitet von Wissenschaftlern und Forschenden vom DLR und einigen anderen Institutionen.
Fazit
Mit dem Projekt haben wir nicht nur technische Fähigkeiten in Konstruktion, Programmierung und Fertigung vertieft, sondern auch gelernt, was echte Teamarbeit bedeutet. Und wer weiß – vielleicht rollt ein Stück unserer Idee in Zukunft wirklich einmal über einen fremden Planeten.